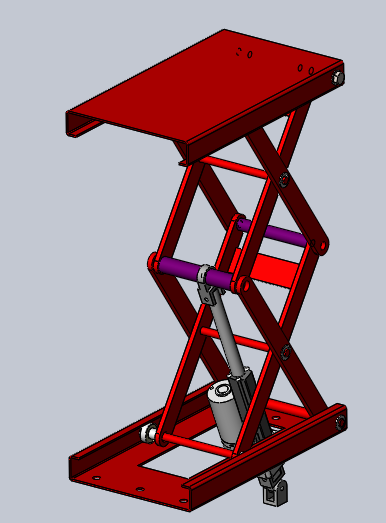
This week, the biggest task on my radar is the robot lift. The robot lift is the component that will extend the robot arm’s height by up to 60 cm. This will increase the size of Centaur’s workspace and enable it to reach more inspection points. The robot lift design has been completed and reviewed.
The robot lift utilizes a linear actuator with feedback control to raise the robotic arm during an inspection. The construction of the robot lift is required to be completed by February 25th, updates will be posted along the way.
Adam is currently working away at developing software for the vision system. A standalone test setup was created to verify the performance of the vision system under the following varied conditions:
- Different lighting
- Camera angles
- Background objects
Adam also developed a GUI to control the pan-tilt and view Xtion feed together.
Wesley is working away at fine tuning and debugging the robotic arm motion planning and control software. Software-enforced joint angle limits are being implemented to constrain the workspace of the robot arm.
I have been working on cleaning up the wiring in the motor compartment of the robot arm and implementing our charger and voltage monitors. I’ve also been looking into interfacing with our CAN bus controller from Linux.
Rahul developed a ROS node capable for receiving multiple LIDAR data channels and flagging when the close proximity of the sensors has been breached by an obstacle for the safety system.