This is the third and final part in my series on tools developed to aid in the development of Centaur’s vision system. The previous part can he found here. This post is about a simple application I created to help determine which colours to detect for identification of pipe markings.
The vision system detects points marked on pipes using a bichromatic colour detection algorithm. The algorithm searches for two different colours next to each other in order to positively identify a marking. A major difficulty in the successful performance of the vision system is correctly calibrating the ranges of colour to look for. If the range is wrong, it may miss markings or detect points that are not markings at all. This is particularly risky in a busy environment like the Symposium, where lighting and the colour of the surrounding environment is highly variable.
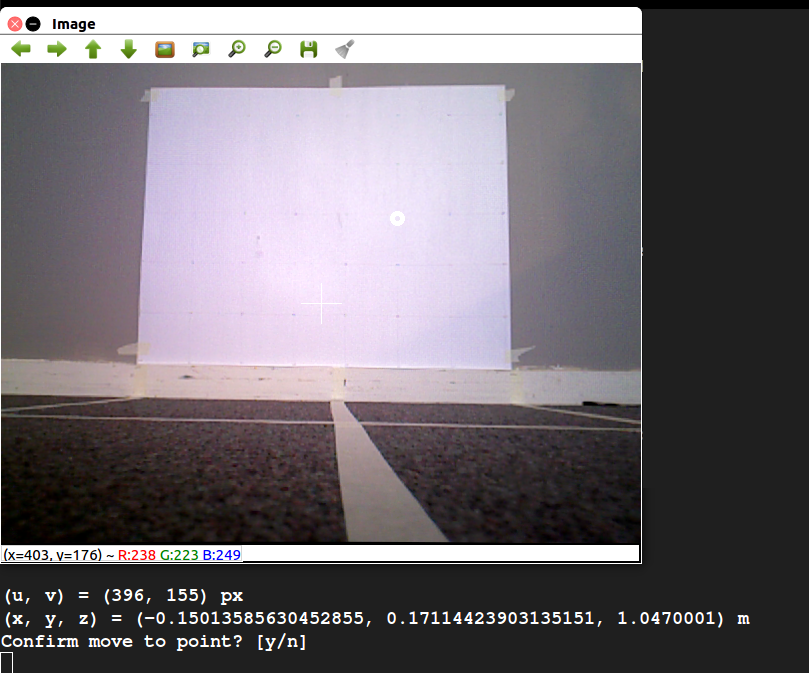
My solution was to develop an application that allows the user to view the Xtion’s feed and select regions that one would like to detect. The application will automatically calculate useful statistics about the region such as the mean, standard deviation, minimum, and maximum pixel values in the region. This application allows one to easily perform calibration in different environments with different lighting conditions without resorting to time-consuming trial and error.