Following up on the goals for reading week (Feb 20 – Feb 26):
Major Goals for Reading Week:
- Complete machining of robot lift, robot enclosure, and supporting brackets to assemble by the February 27th
- Complete integration of vision system with robot
- Implementation of LIDAR safety systems and real world testing
- Tuning of drive PID controller with load on the wheels
- Integration and final wiring on February 27th
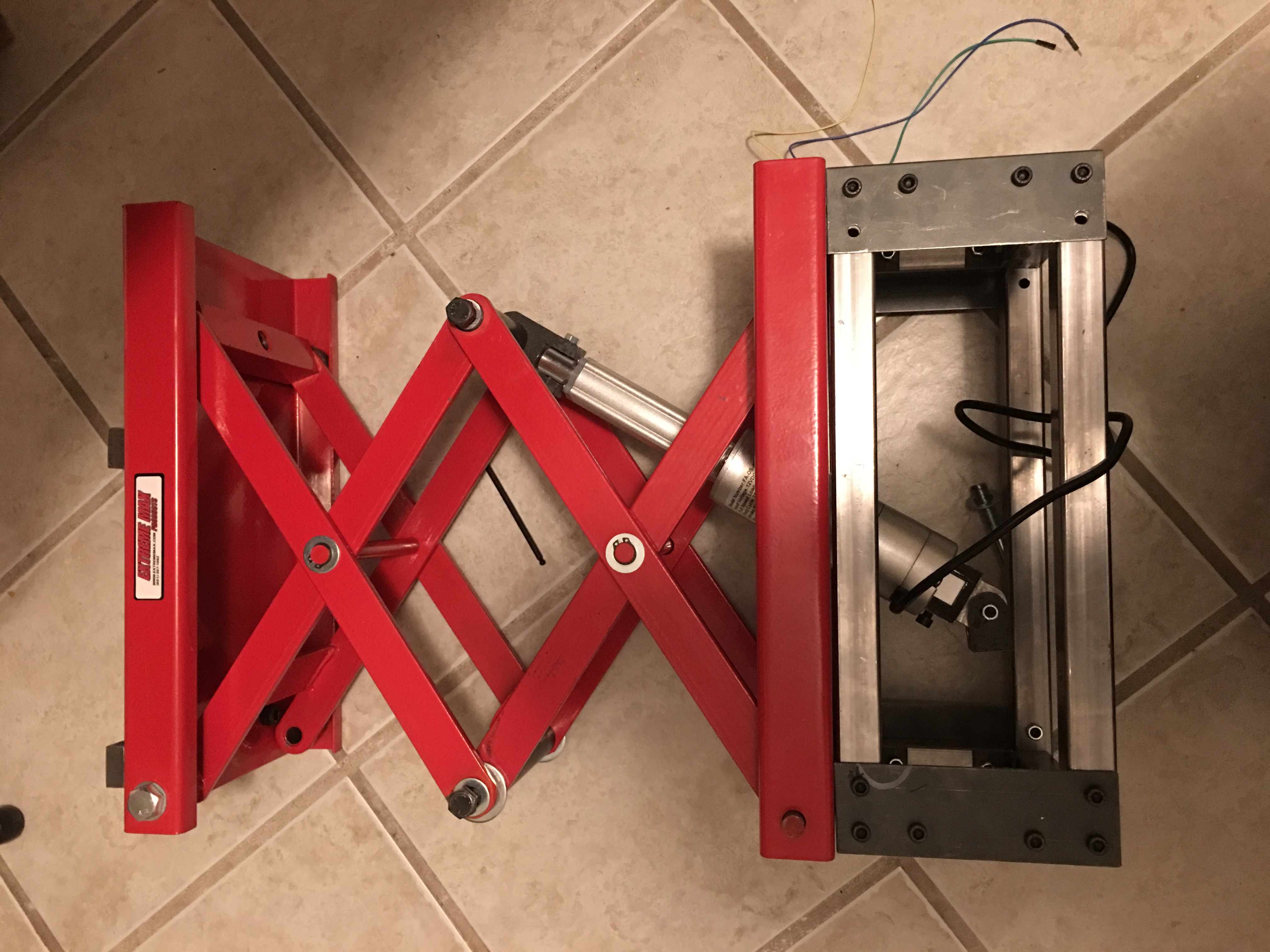
The project has fallen behind schedule mainly due to the machining of the robot lift, enclosure, and supporting brackets taking much longer than expected. After 11 days of an average of 8 hours of machining, the lift is done pending final tests, the robot enclosure has only a few more holes to drill, and the supporting brackets are complete. However, this heavy delay has blocked electrical work requiring the assembled robot to complete wiring.
As the team lead and project manager, I am finding it hard to keep the project on track given these delays and many courses having big deliverables around the same time. For the first time in the project, the weekly Sunday work session reserved for group work and integration is being canceled due to the busy schedule of group members and the mechanical work blocking further progress.
There are 10 more working days (not including Sunday). The new deadline for mechanical assembly has been extended to end of the day on Monday, March 6th. This is the third extension and probably the last one we can afford to do while making the symposium deadline.
Here are some updates of the mechanical components:
Upper Enclosure Progress Update: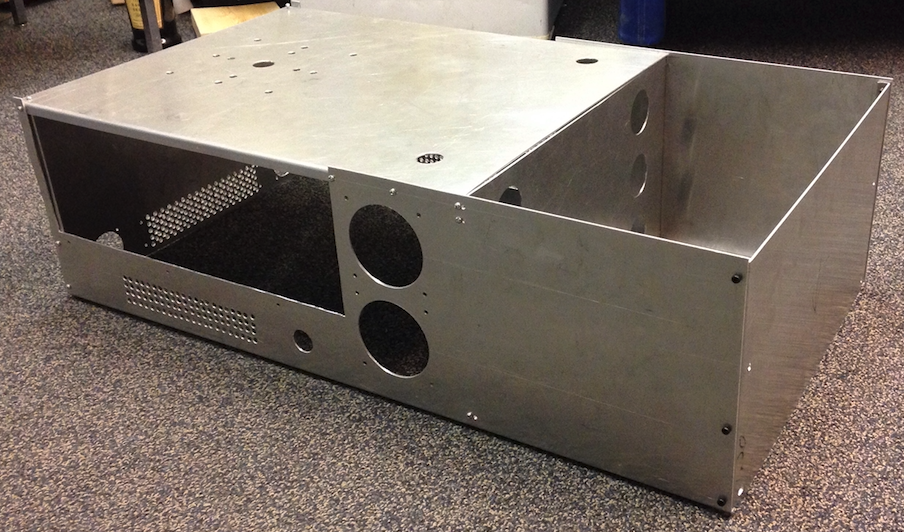
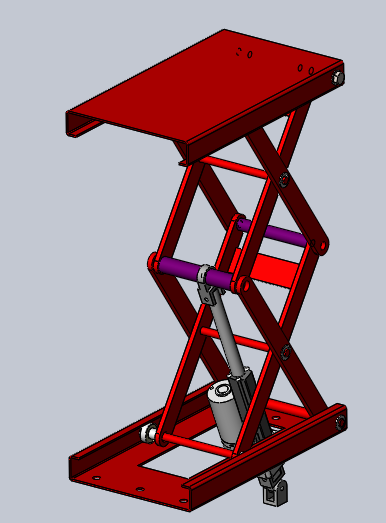
Robot Lift Update:
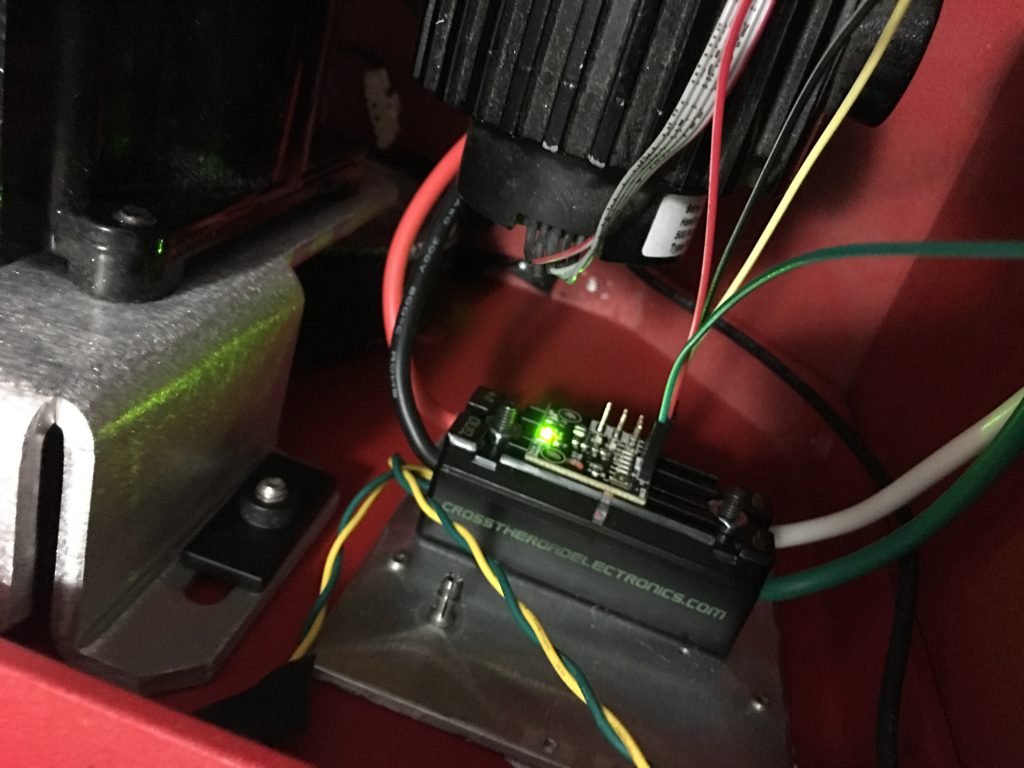
Sensor Post Update with Temporary Platform: