I’m in charge of the vision system for Project Centaur. The vision system is responsible for identifying locations on pipes for the robot arm to approach and measure. To accomplish this, we are using an Xtion PRO LIVE, which is a 3D sensor similar to the Kinect. To vastly broaden our possible field of view, we decided to mount the Xtion on a pan-tilt mechanism.
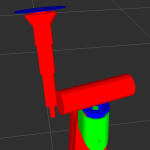
The pan-tilt mechanism that we’re using is made by Robotis, and uses two Dynamixel AX-12+ motors for panning and tilting. An image of it can be seen below. My job was to get it panning and tilting via ROS commands.

To start, I just wanted to get some sort of programmatic control working without using ROS. I found and downloaded the SDK, which is useful in that it provides bindings for many different programming languages. The only practical options here were C++ and Python, since those are what ROS (easily) supports. I chose Python because it’s much faster for prototyping and I just like it a lot better than C++.
I opened up one of the Python examples provided with the SDK. It was quite informative, but it showed that thin bindings to C functions were all the SDK provided. As such, I set out to create a much nicer Python object-oriented interface for the motor. Using my interface, one could easily initialize, shutdown, set speeds, and read and write the pan-tilt values, instead of having to directly write bytes to specific addresses on the motor controller.
With a nice interface complete, the last step was to build a ROS node on top of it. I created a simple node that publishes the pan and tilt angles, in radians, and subscribes to a Twist message for movement. This will allow us to easily integrate the pan-tilt mechanism into the overall system.
The code which I’ve written for the pan-tilt is not currently open-source, but I may post it after further testing.