Our project is using the ST Robotics R12 in order to perform thickness measurements on pipes. We plan to do this by positioning an ultrasonic sensor against those pipes, allowing thickness measurements to be read. In order to perform that sort of action, we need to have good control over the arm. And in order to test our control, we want to have a simulated model of the arm.
Since we plan on using ROS to run our project, we have several good options to do this. First of all, we have Gazebo and rviz as simulation and visualization/debugging tools. Second, the MoveIt! software package will allow us to develop motion plans for the arm.
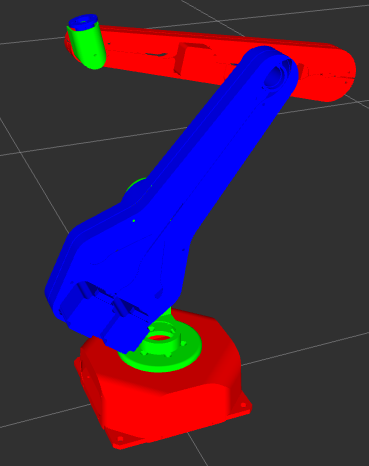
I was able to use CAD files to create a URDF model of the R12 arm. I put this into a new package, created a Gazebo world for the arm, and created a package with ros-control plugins. With all of this done, the arm could be spawned in Gazebo and controlled over ros-control topics. The arm can also be visualised in rviz, allowing the visualisation of motion plans and other data alongside the arm.
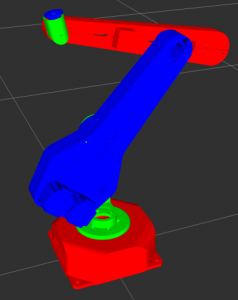
After this, I developed a MoveIt! package to control the R12. Luckily, MoveIt!’s setup assistant was able to work through most of the details of creating the original package. Once that was made, there were some problems in actually using MoveIt! to solve a motion plan. I found out after some work that this was due to the arm being a 5-DOFarm, which MoveIt!’s planning library does not support well. I was able to tweak some settings after this to get reasonable performance.
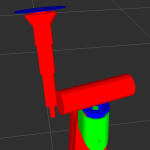
With this done, I was able to perform my first round of tests for further development. In order to reach around the pipe to gather the best data, we needed to design an end-effector to help reach around the pipe. I came up with some different conceptual designs, and created simulated models. MoveIt! was able to adapt easily to switches between them. With each of the models, I tested MoveIt!’s ability to create a motion plan to various points around a pipe, while avoiding collisions with that pipe.
Contrary to what I had expected, one of the best designs was a near-direct attachment of the probe on the end of the arm. This looks like a nice simple design that we will be implementing in the future.
With this done, the next task will be integrating direct joint information from the R12 to ROS, as well as translating MoveIt!’s motion plans to a form that the real R12 can use and execute.